ANALISA DAN MONITORING SISTEM PENGUKURAN KETINGGIAN CAIRAN MENGGUNAKAN MULTI SENSOR BERBASIS IOT
Jimmy Rumengan dan Benfano Soewito
Transformasi digital melalui teknologi diklaim mempunyai maanfaat yang baik untuk industri-industri, banyak industri yang sudah mulai memanfaatkan teknologi otomasi mesin-mesin pada proses pengolahan-pengolahan. Penggunaan mesin-mesin canggih sudah merupakan hal umum dalam suatu industri guna, meningkatkan proses produksi yang memberikan hasil yang berkualitas. Hal tersebut bukanlah tanpa alasan, melainkan dikarenakan banyaknya keuntungan yang tidak dapat dibandingkan jika hanya menggunakan tenaga manusia dan juga penerapan sistem otomasi dalam industri dapat meningkatkan produktivitas serta mengurangi kemungkinan gagal dalam suatu proses produksi. Sistem otomasi juga dapat mengurangi biaya produksi, waktu produksi, serta meningkatkan kualitas produk. (Sreejeth & Chouhan, In 2016).
Pada industri proses seperti industri petro-chemical, pembuatan kertas, dan industri pengolahan air yang melibatkan cairan, dimana suatu cairan akan dipompa dan dialirkan dari satu tangki ke tangki yang lain untuk diolah sangat membutuhkan teknologi-teknologi yang mampu membantu dalam proses pengolahan. Ada beberapa jenis tangki yang banyak digunakan pada industri proses yaitu jenis tangki yang tidak terhubung dengan tangki yang lain (single tank) dan ada yang tersusun dari beberapa tangki yang saling berhubungan (coupled tank) (Ramli, Ahmad, & Ismail, 2009, November). Sistem pencampuran cairan didalam industri proses sangat diperlukan guna meningkatkan hasil produksi dan meminimalisir presentase kesalahan. Pengendalian manual banyak memiliki keterbatasan biaya yang besar dan tidak aman. (Sastry, Srinivas, Krishna, & KiranKumar, (2010))
Salah satu proses yang sangat penting adalah pada pengaturan level ketinggian cairan di dalam tangki, dimana level ketinggian pada tangki kedua akan dipengaruhi oleh aliran dari tangki pertama. Pemindahan cairan dari satu tangki yang lain menyebabkan berubahnya level ketinggian cairan dalam tangki. Dalam pengaturan level ketinggian cairan pada tangki, pemindahan cairan biasa disebut sebagai pembebanan pada level. Perubahan beban ini dapat dipengaruhi dari kinerja kontroler. Kontroler yang umum digunakan pada industri adalah kontroler PID karena kesederhanaan strukturnya dan kehandalanya (Omatu, Kishida, & Yoshioka, 21-23 April 1998). Pada setiap perangkat kontrol di industri seperti programmable logic controller (PLC) tersedia kontroler PID dengan tambahan fitur autotuning untuk memudahkan operator menjalankan sistem kontrol umpan balik dengan PID. Tuning parameter kontroler PID dilakukan dengan menyesuaikan nilai proportional gain (Kp), integral time (Ʈi), derivative time (Ʈd) agar tercapai spesifikasi yang diinginkan. Pada prakteknya di dunia industri tuning parameter PID sering dilakukan dengan cara trial and error. 2 Prosedur ini akan memakan banyak waktu dan membutuhkan seorang operator yang handal (Ji & Li, 10-11 October 2009.). Akan tetapi apabila plant sering mengalami perubahan beban maka kontroler PID perlu dilakukan tuning parameter ulang agar tetap memenuhi spesifikasi kontrol yang diharapkan. Sehingga perlu diterapkan metode autotuning parameter kontroler PID yang dapat meminimumkan akan adanya error bila tuning dilakukan dengan prosedur trial and error dan tetap menjaga spesifikasi kontrol yang diharapkan.
Untuk meningkatkan kualitas dan kuantitas produksi pada industri-industri yang menggunakan pengukuran level ketinggian cairan pada tangki-tangki, sangat bergantung dalam pengukuran ketinggian cairan yang akurat dan penggunaan sistem otomasi yang sudah berbasis komputerisasi yang handal dan mudah. Oleh karena industri-industri itu sangat membutuhkan sistem instrumentasi pengukuran level air yang akurat untuk mengendalikan dan memonitoring ketinggian cairan dalam suatu tangki. Perancangan sistem ini sesuai dengan nilai referensi (setpoint). Untuk memodelkan proses industri diperlukan untuk merancang pengontrol linier seperti Propotional integral derivative (PID). Sebuah kontroler PID secara kontinyu menghitung nilai kesalahan sebagai beda antara setpoint yang diinginkan dan variable proses terukur. Kontrol level cairan adalah representasi khas dari kontrol proses dan banyak digunakan dalam industri besi dan baja, kimia, minyak bumi dan lainnya. Kualitas kontrol secara langsung mempengaruhi kualitas produk dan keamanan peralatan. Namun, sistem kontrol level cairan tangki air memiliki potensi sistem lag yang besar, beragam waktu, dan nonlinier dan bisa sangat sulit dikendalikan. Sekarang, kontrol level cairan telah menjadi area aktif dalam kontrol proses selama beberapa dekade terakhir dan berbagai pendekatan berbeda telah dilakukan. Dalam penelitian, model sistem yang digunakan adalah terkait kalibrasi pengukuran 3 (tiga) sensor serta monitoring dengan 3 (tiga) tangki dengan volume yang sama. Secara khusus, akan dipaparkan juga prinsip pemodelan dasar keseimbangan massa cairan, kalibrasi sensor tekanan, dan metodologi desain kontrol umpan balik untuk sistem kontrol level tangki. Ketidakakuratan dalam pengukuran ketinggian dapat menyebabkan kerugian dalam proses produksi, bahkan dapat menyebabkan permasalahan terhadap kualitas produk.
Berdasarkan masalah diatas, didapati beberapa kendala-kendala pada sistem pengukuran ketinggian cairan yang berfungsi pada tangki-tangki sebagai salah satu perangkat penting dalam proses industri. Kendala-kendala tersebut adalah, masih banyak pompa-pompa pada tangki yang dijalankan secara manual, masih banyak penggunaan pengukuran ketinggian secara manual dan masih banyak penggunaan sensor ketinggian cairan yang memiliki toleransi yang tinggi sehingga tidak teliti, mudah rusak dan tidak akurat. Oleh karena itu, diperlukan suatu sistem kendali dengan beberapa besaran proses yang harus diukur dan dikendalikan pada suatu industri proses, salah satu yang penting adalah permukaan (level) zat cair di sebuah tanki serta aliran (flow) suatu proses.
Pengukuran level cairan di industri mempunyai variasi yang luas, dari menggunakan alat sederhana dan murah yang terpasang di panel, ataupun yang terpasang dilokal, sampai jenis yang canggih dan kompleks. Salah satu alat yang dapat mengukur level cairan adalah dengan menggunakan sensor. Namun sampai saat ini pengukuran level cairan masih menggunakan 1 (satu) sensor, sehingga akurasi penetapan variabel nya sering mengalami kesalahan dan tingkat akurasi nya rendah. (Sharma, Arora, & Kaushik, 2015)
Dalam upaya menyeselaikan permasalahan tersebut diatas, maka dibutuhkan Analisa pengukuran terhadap model sistem kontrol cairan untuk memperoleh data yang akurat terkait kecepatan pengambilan data pengukuran setiap sensor yang dibandingkan.
Perancangan sistem monitoring ketinggian cairan yang dibuat menggunakan 3 (tiga) sensor yaitu sensor Infrared, sensor Ultrasonik dan Sensor Float (apung). Semua sensor akan terhubung dengan Relay sebagai perantara sensor dengan Lolin NODMCU V.3 ESP8266. Lolin NODMCU V.3 ESP8266 menyimpan data dari semua sensor lalu di kirimkan kepada Cloud/MySql untuk diolah menjadi informasi melalui WiFi Modul ESP 8266 . Informasi yang telah diolah dapat di tampilkan pada Android atau Personal Computer (PC).
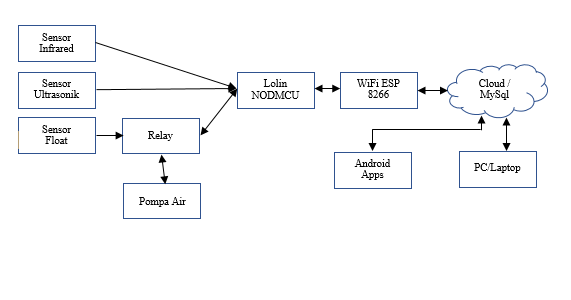
Perancangan sistem pada gambar 1 diatas berisi tentang proses perancangan sistem dan komponen-kompenen pada blok diagram adalah sebagai berikut :
- Sensor Infrared(IR) sebagai sensor yang mendeteksi keberadaan obyek didepan sensor yaitu pelampung dan mengukur berapa jauh jarak objek tersebut, kemudian dari hasil pengukuran dilakukan perhitungan untuk mendapatkan posisi ketinggian cairan tersebut.
- Sensor Ultrasonik sebagai sensor yang kerjanya berdasarkan prinsip dari pantulan suatu gelombang suara sehingga dapat menafsirkan eksistensi sebuah benda spesifik yang ada dalam frekuensinya. Gelombang ultrasonik bekerja dalam frekuensi 40KHz-400KHz dengan dua buah unit yang satu untuk pemancar dan satu lagi sebagai penerima.
- Sensor Float ini digunakan untuk mendeteksi ketinggian zat cair dengan memanfaatkan gaya apung pada permukaan. Pelampung (float) memiliki magnet dengan elemen transduksi berbentuk silinder (reed magnetic). Magnet yang berada didalam pelampung (float) terbungkus oleh material plastik PP berkualitas dan tahan panas hingga 120 C. Magnet pelampung dapat dilepaskan kemudian di pasang terbalik untuk merubah switch sesuai kebutuhan: NO (normally open) atau NC (normally close). Spesifikasi: Tipe switch: NO / NC (bisa diubah), Daya maksimal: 10W , Tegangan maksimal: 100V DC, Arus maksimal: 500mA. Bahan: Plastik PP, Diameter ulir : 8mm.
- Relay Arduino sebagai relay yang berfungsi sebagai saklar elektrik, yang menghubungkan sensor-sensor dengan Lolin NODMCU V.3 ESP8266.
- Pompa air sebagai alat yang berfungsi untuk mengisi cairan pada wadah secara otomatis
- Lolin NODMCU V.3 ESP8266
Lolin NODMCU V.3 ESP8266 sebagai mikrokontroler jenis Lolin NODMCU V.3 ESP8266 sebagai pengontrol elektronik unutk membaca dan menulis data untuk tersambung ke komputer. Arduino uno adalah suatu mikrokontroler pada ATMEGA 2560 yang mempunyai 54 input/output digital yang mana 16 pin digunakan sebagai PWM keluaran, 16 pin masukan analog dan didalamnya terdapat 16 masukan analog dan didalamnya terdapat 16 MHz osilator kristal, USB koneksi, power, ICSP , dan tombol reset. Kinerja Arduino ini memerlukan dukungan mikrokontroler dengna menghubungkan pada suatu komputer dengan USB kabel untuk menghidupkannya menggunakan arus AC atau DC dan bisa juga dengan baterai.
- WiFi ESP 8266 sebagai perangkat tambahan mikrokontroler seperti Arduino agar dapat terhubung langsung dengan Wifi dan membuat koneksi TCP/IP. Modul ini membutuhkan daya sekitar 3.3.v dengan memiliki tiga mode wifi yaitu station, access point dan Both (keduanya). Modul ini juga dilengkapi dengan prosesor, memori dan GPIO dimana jumlah pin bergantung dengan jenis ESP8266 yang digunakan. Sehingga modul ini bisa berdiri sendiri tanpa menggunakan mikrokontroler apapun karena sudah memiliki perlengkapan layaknya mikrokontroler.
- Cloud sebagai platform yang mempermudah pengambilan data dari sensor dan mengubahnya menjadi informasi. Ubidots digunakan juga mengatur aksi yang dilakukan atau memberikan peringatan berdasarkan data yang didapat. Hosting menyediakan API untuk membantu proses pengumpulan data dan menjadikan sebagai infromasi.
- Android dan PC/Laptop sebagai sarana untuk mengakses Cloud/MySql.
Tangki yang berisi cairan diletakan sensor-sensor diatas bagian tangki, setelah itu sensor akan mengambil data ketinggian caraian pada tangki. Setiap relay yang terhubung dengan sensor-sensor akan mengirimkan data melalui cloud/Hosting sehingga dapat diakses melalui Android ataupun PC/Laptop. Untuk melakukan pengukuran terhadap akurasi sensor-sensor tersebut, data yang terkirim ke Cloud akan dilakukan pengukuran dari pembacaan masing-masing sensor untuk menganalisa keakurasiannya.
Dalam penelitian ini juga dibutuhkan beberapa perangkat yang digunakan untuk menunjang peneilitan agar berjalan dengan lancer dan sesuai dengan topik pembahasaan. Perangkat tersebut di bagi menjadi dua, yaitu perangkat Lunak (Software) dan perangkat Keras (Hardware).
Comments :