Pemodelan ANFIS untuk Masalah Odor Source Localization (OSL)
Seperti ditunjukkan pada Gambar 1, skema pemodelan ANFIS untuk masalah OSL dapat dipisahkan menjadi dua bagian yaitu offline procedures dan online procedures. Dalam offline procedures, model ANFIS dibuat dan dilakukan training dengan record dihasilkan dari tes OSL untuk mengimplementasikan moth-inspired dan Bayesian-inference olfactory-based navigation methods. Proses training dianggap selesai jika jumlah training epoch mencapai nilai yang telah ditentukan. Dalam online procedures, model ANFIS yang sudah ditraining divalidasi dengan pencarian sumber bau dalam simulasi dengan berbagai bidang aliran udara dan kondisi pencarian yang berbeda. Pengujian dipertimbangkan lengkap jika robot dapat menemukan sumber bau dengan benar, jika tidak, dilakukan beberapa perubahan parameter pada model ANFIS, dan model ANFIS do training lagi.
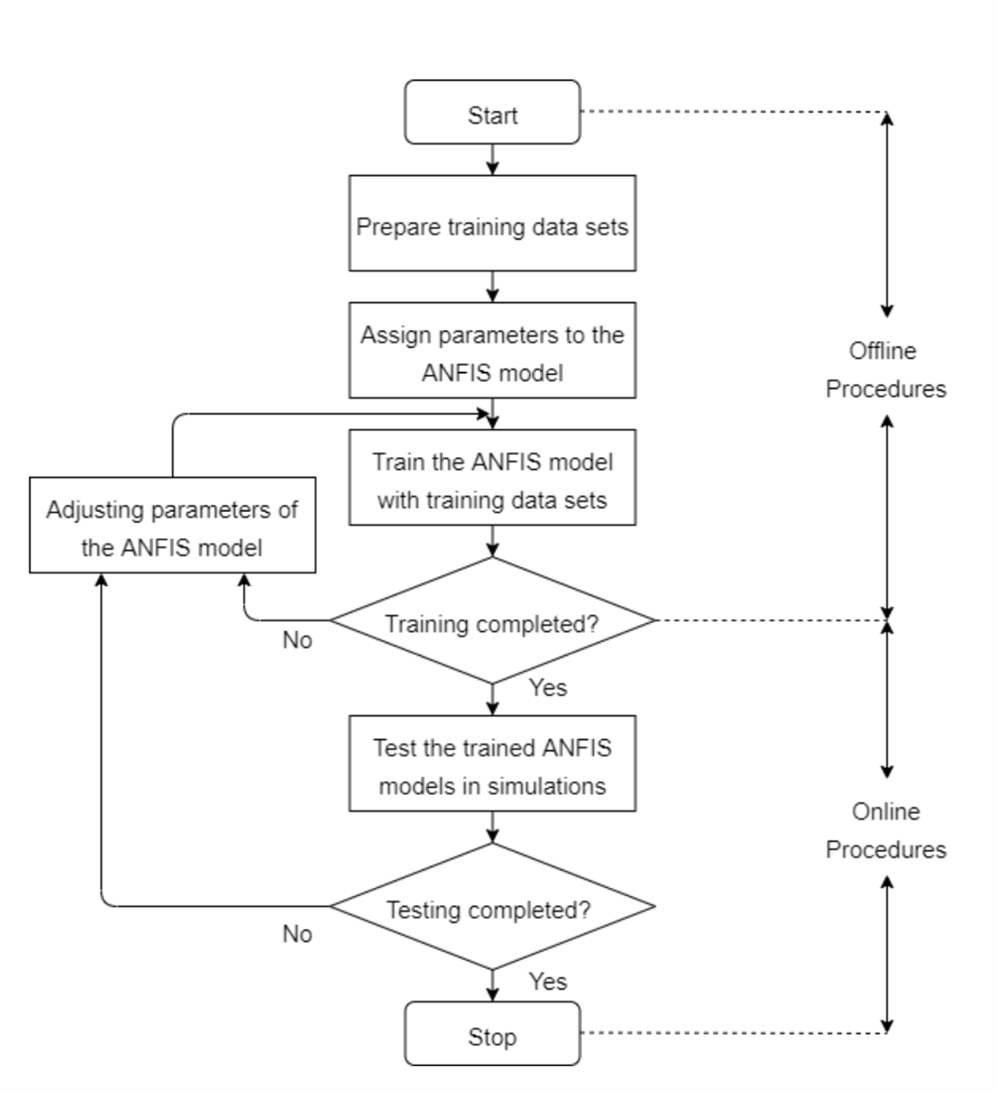
Gambar 1 Kerangka Penelitian Olfactory-Based Navigation Method
- Melatih ANFIS Models dengan Training Data Sets
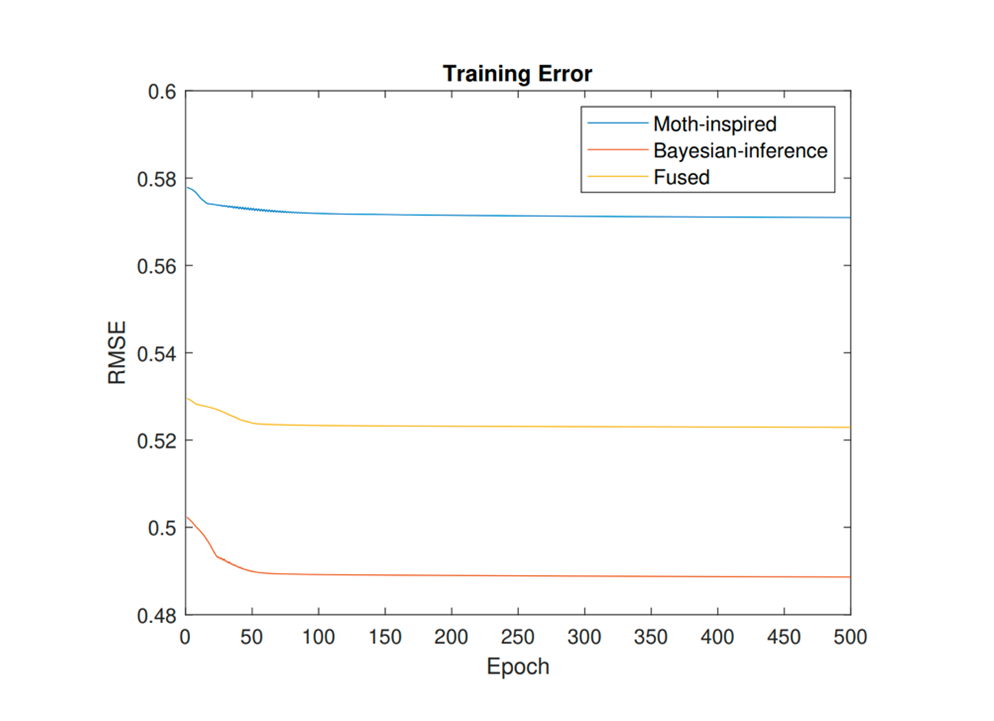 Gambar 2 Plot RMSE di setiap epoch dengan training sets yang berbeda
Gambar 2 Plot RMSE di setiap epoch dengan training sets yang berbeda
Gambar 2 menunjukkan plot RMSE setelah melatih model ANFIS dengan set data training yang berbeda. Dapat dilihat bahwa semua plot RMSE konstant setelah sekitar 100 epoch. Secara khusus, RMSE dari data sets moth-inspired adalah 0.572 setelah 100 epoch dan sedikit menurun ke 0.571 setelah 500 epoch. Nilai RMSE dari data sets Bayesian-inference 0.489 setelah 100 epoch dan 0.488 setelah 500 epoch. Adapun setelah dilakukan penggabungan data sets, Nilai RMSE nya adalah 0.523 saat epoch training adalah 100 dan secara samar menurun menjadi 0.522 setelah 500 epoch. Secara umum, untuk tiga set data pelatihan, nilai RMSE menurun dengan meningkatnya angka epoch, tetapi setelah 100 epoch, perubahan RMSE kecil. Setelah proses training selesai, model ANFIS dilatih (MO-ANFIS, BA-ANFIS, dan FU-ANFIS) diperoleh setelah 500
epoch training dipilih dan digunakan dalam simulasi dengan pengaturan lingkungan U0 = (0.4; 0) m/s dan V = 5 untuk verifikasi validitas metode ANFIS yang diusulkan dalam masalah OSL.
Dalam ratusan simulasi tes OSL dengan lingkungan yang berbeda. Setelah pelatihan dengan algoritma hybrid-learning, model ANFIS divalidasi dalam beberapa tes OSL dengan berbagai pencarian kondisi. Hasil percobaan menunjukkan bahwa model ANFIS dapat meniru metode navigasi berbasis penciuman lainnya dan benar menemukan sumber bau. Selain itu, dengan melakukan training dengan menggabungkan dengan menyatu set data training model ANFIS lebih baik dari dua model tradisional metode navigasi dalam hal waktu pencarian rata-rata.